PyTorch入门教程

PyTorch和TensorFlow是当今最知名的两大深度学习框架,近两年PyTorch在学术领域迅速反超TensorFlow并成为主流,是目前最有前景的深度学习框架。
笔记介绍了PyTorch的基本函数和搭建框架以及训练优化的常规思路,共包含六个部分,分别是数据准备、模型搭建、模型训练、模型验证、模型保存与读取、常规搭建与训练思路。
参考资料:官方文档(PyTorch documentation)
一、数据准备
1. 读取数据
读取数据需要创建一个torch.utils.data.Dataset类的实例。PyTorch提供了一些Dataset子类便于直接读取公开的数据集资源,本地训练样本一般构建一个自定义的子类进行读取。
读取公开数据集:
以图像数据为例,torchvision.datasets中定义了许多公开图像数据集资源的Dataset子类。以读取CIFAR-10数据集为例,使用torchvision.datasets.CIFAR10()可以实例化数据,其中:
root:根目录地址
train:获取训练集还是测试集,True为训练集,False为测试集
download:是否下载,设置为True时当数据集已存在时会自动跳过
transform:调用预处理程序,None为不处理
参考代码:
from torchvision.datasets import CIFAR10
root_dir = "./dataset"
test_data = CIFAR10(root = root_dir,
train = False,
download = True,
transform = torchvision.transforms.ToTensor())
读取本地数据集:
本地数据因存储图片与标签的方式不同,一般需要自定义类来正确读取数据。
要点是在__init__(self)函数中定义类内的全局变量;在__getitem__(self, item)函数中定义读取索引图片和标签内容的函数,并返回图片与标签的内容;通常还定义__len__(self)函数返回数据集的长度。
以下是其中一种存储结构及其读取代码:
from torch.utils.data import Dataset
from PIL import Image
import os
class Mydata(Dataset):
def __init__(self, root_dir, label_dir):
self.root_dir = root_dir
self.label_dir = label_dir
self.path = os.path.join(self.root_dir,
self.label_dir)
self.img_path = os.listdir(self.path)
def __getitem__(self, item):
img_name = self.img_path[item]
img_item_path = os.path.join(self.root_dir,
self.label_dir,
img_name)
img = Image.open(img_item_path)
label = self.label_dir
return img, label
def __len__(self):
return len(self.img_path)
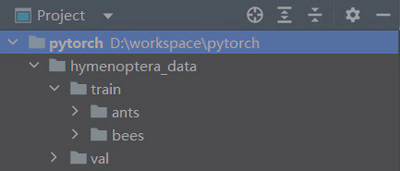
root_dir = "hymenoptera_data/train"
ants_label_dir = "ants"
bees_label_dir = "bees"
ants_dataset = Mydata(root_dir, ants_label_dir)
bees_dataset = Mydata(root_dir, bees_label_dir)
train_dataset = ants_dataset + bees_dataset
2. 变换
变换是对数据进行常见的预处理,如重采样、格式转换、裁剪等。PyTorch对图形、文本和声音的变换工具分别位于 torchvision.transforms,torchtext.transforms和torchaudio.transforms。
变换类的实例可以直接作为函数使用:
from PIL import Image
from torchvision import transforms
a = Image.open("test.jpg")
transform = transforms.ToTensor()
a.ts = transform(a)
通常作为参数在读取数据时使用:
from torchvision import transforms
from torchvision.datasets import CIFAR10
root_dir = "./dataset"
transform = transforms.ToTensor()
test_data = CIFAR10(root = root_dir,
train = False,
download = True,
transform = transform)
当变化较多时可使用transforms.Compose()函数进行组合定义:
from torchvision import transforms
transform = transforms.Compose([transforms.Resize(400),
transforms.CenterCrop(400),
transforms.ToTensor()])
3. 加载数据集
加载数据集torch.utils.data.DataLoader()是从数据集中选取和组织数据,常用的参数如下:
dataset:数据源
batch_size:每个批次的样本数量
shuffle:数据集是否随机洗牌
drop_last:若数据集总量不能完全分配到每个批次,是否剔除最后一个批次
参考代码:
from torch.utils.data import DataLoader
test_loader = DataLoader(dataset = train_data,
batch_size = 64,
shuffle = True,
drop_last = True)
定义后用循环将数据中的批次依次送入网络计算和训练:
for epoch in range(20):
for data in test_loader:
imgs, targets = data
二、模型搭建
神经网络的框架由不同的层构成,torch.nn类中定义了卷积层、池化层、线性层等众多预设的层,不同类型层的参数与定义可参考torch.nn - PyTorch 1.13 documentation。
注:torch.nn下的类用于模型构建,torch.nn.functional下的对应函数可直接使用。
from torch import nn
conv1 = nn.Conv2d(3, 32, 5, 1, 2)
conv2 = nn.Conv2d(32, 32, 5, 1, 2)
maxpool = nn.MaxPool2d(2)
当层数较多时可用torch.nn.Sequantial()类组合定义模型:
from torch import nn
model = nn.Sequential(
nn.Conv2d(3, 32, 5, 1, 2),
nn.MaxPool2d(2),
nn.Conv2d(32, 32, 5, 1, 2),
nn.MaxPool2d(2),
nn.Conv2d(32, 64, 5, 1, 2),
nn.MaxPool2d(2),
nn.Flatten(),
nn.Linear(64*4*4, 64),
nn.Linear(64, 10)
)
构建完整的神经网络框架需要定义一个torch.nn.Module的子类。在__init__(self)函数中初始化模型,并定义模型需要使用的各类神经层;在forward(self, x)函数中使用定义好的层组建神经网络,最终返回输出值。
from torch import nn
class NN_Module(nn.Module):
def __init__(self):
super(NN_Module, self).__init__()
self.model = nn.Sequential(
nn.Conv2d(3, 32, 5, 1, 2),
nn.MaxPool2d(2),
nn.Conv2d(32, 32, 5, 1, 2),
nn.MaxPool2d(2),
nn.Conv2d(32, 64, 5, 1, 2),
nn.MaxPool2d(2),
nn.Flatten(),
nn.Linear(64*4*4, 64),
nn.Linear(64, 10)
)
def forward(self, x):
x = self.model(x)
return x
nn_module = NN_Module()
三、模型训练
模型训练即优化模型中的参数(权重),为此需要确定误差的定义(损失函数)与优化的方法(优化器)。进入训练前使用模型实例的.train()函数进入训练模式。
nn_module.train()
1. 损失函数
损失函数是模型反向传播误差优化权重的依据,实例化合适的损失函数后,计算误差,再使用误差的backward()函数反向传播。不同的损失函数可参考torch.nn - PyTorch 1.13 documentation。
from torch import nn
# 定义损失函数
loss_fn = nn.CrossEntropyLoss()
# 计算误差,outputs是模型输出,targets是正确标签
loss = loss_fn(outputs, targets)
# 反向传播误差
loss.backward()
2. 优化器
优化器定义了模型权重的优化方式,torch.optim类提供了多种优化器。不同优化器的参数和方法介绍可参考torch.optim - PyTorch 1.13 documentation。一般需要设置学习速率(lr)。
import torch
# 定义优化器
optimizer = torch.optim.SGD(params = nn_module.parameters(),
lr = learning_rate)
# 在反向传播误差计算梯度后进行权重优化
optimizer.step()
四、模型验证
模型的验证可以继续使用损失函数,也可以自定义新的规则,只需要循环验证集数据的批次作为模型输入对比输出与标签即可。进入验证前使用模型实例的.train()函数进入验证模式。
nn_module.eval()
使用with torch.no_grad()可以停止梯度运算提高效率。
total_test_loss = 0
with torch.no_grad():
for data in test_dataloader:
imgs, targets = data
outputs = nn_module(imgs)
loss = loss_fn(outputs, targets)
total_test_loss = total_test_loss + loss.item()
五、模型保存与读取
1. 模型保存
训练完毕的模型有两种保存方式。
import torch
# 保存模型结构与参数
torch.save(obj = nn_module,
f = "NN_Module.pth")
# 仅保存模型参数
torch.save(obj = nn_module.state_dict(),
f = "NN_Module_state_dict.pth")
2. 模型读取
加载之前保存的训练模型或参数使用torch.load()函数。
import torch
# 读取模型结构与参数
torch.load("NN_Module.pth")
# 仅读取模型参数
model.load_state_dict(torch.load("NN_Module_state_dict.pth"))
3. 现有模型
PyTorch在torchvision.models提供了一些经典的训练完毕的模型,以vgg16为例,设置值pretrained参数选择是否读取训练完毕的权重。
import torch
vgg16 = torchvision.models.vgg16(pretrained = True)
还可以对这些模型进行修改:
# 在vgg16模型最后添加一个线性层
vgg16.add_module('linear', nn.Linear(1000, 10))
# 在vgg16模型的classifier部分后添加一个线性层
vgg16.classifier.add_module('add_linear', nn.Linear(1000, 10))
# 将vgg16模型的classifier部分中第7个层改为线性层
vgg16.classifier[6] = nn.Linear(4096, 10)
六、常规搭建与训练思路
1. 常规思路
定义与加载数据集
创建网络模型和定义损失函数与优化器
循环训练次数与批次训练模型
输出单个批次的模型输出
计算和反向传播该批次的误差
模型权重优化
参考代码:
import torch
from torch import nn
from torchvision import transforms
from torchvision.datasets import MNIST
from torch.utils.data import DataLoader
# 定义模型
class NN_Module(nn.Module):
def __init__(self):
super(NN_Module, self).__init__()
self.model = nn.Sequential(
nn.Conv2d(1, 32, 5, 1, 2),
nn.ReLU(),
nn.MaxPool2d(2),
nn.Conv2d(32, 64, 5, 1, 2),
nn.MaxPool2d(2),
nn.Flatten(),
nn.Linear(7 * 7 * 64, 1024),
nn.ReLU(),
nn.Linear(1024, 10),
nn.Softmax(dim=1)
)
def forward(self, x):
x = self.model(x)
return x
# 定义训练程序
def train_model(module,
epoch,
train_dataloader,
loss_fn,
optimizer):
module.train()
# 记录训练的次数
total_train_step = 0
for i in range(epoch):
for data in train_dataloader:
imgs, targets = data
imgs = imgs.to(device)
targets = targets.to(device)
outputs = module(imgs)
# 误差计算和权重优化
loss = loss_fn(outputs, targets)
optimizer.zero_grad()
loss.backward()
optimizer.step()
# 统计
total_train_step = total_train_step + 1
if total_train_step % 100 == 0:
print("epoch: {}, batch:{}, Loss: {:.3f}".format(i + 1,
total_train_step,
loss.item()))
# 定义验证程序
def val_model(modol,
val_dataloader):
modol.eval()
total_hits = 0
with torch.no_grad():
for data in val_dataloader:
imgs, targets = data
imgs = imgs.to(device)
targets = targets.to(device)
outputs = modol(imgs)
hits = (outputs.argmax(1) == targets).sum()
total_hits = total_hits + hits
total_accuracy = total_hits / len(val_dataset)
print("Accuracy in validation dataset: {:.2f}".format((total_accuracy.round(decimals=2))))
# 定义transform
transform = transforms.Compose([transforms.ToTensor()])
# 读取数据集
train_dataset = MNIST(root="Data",
train=True,
download=True,
transform=transform)
val_dataset = MNIST(root="Data",
train=False,
download=True,
transform=transform)
# 加载数据集
train_dataloader = DataLoader(train_dataset,
batch_size=64,
shuffle=True,
drop_last=True)
val_dataloader = DataLoader(val_dataset,
batch_size=64,
drop_last=True)
# 定义训练设备
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
# 实例化模型
nn_module = NN_Module()
nn_module.to(device)
# 实例化损失函数
loss_fn = nn.CrossEntropyLoss()
loss_fn.to(device)
# 实例化优化器
optimizer = torch.optim.Adam(params=nn_module.parameters())
# 训练模型
train_model(nn_module,
epoch=2,
train_dataloader=train_dataloader,
loss_fn=loss_fn,
optimizer=optimizer)
# 验证模型
val_model(nn_module, val_dataloader)
2. GPU训练
先使用torch.device()定义训练设备,使用模型、数据和损失函数的.to()函数修改设备。“cpu”与“cuda:0”分别使用CPU与GPU,“cuda:0”表明使用第一个显卡。
import torch
device = torch.device("cuda:0")
nn_module.to(device)
loss_f.to(device)
imgs = imgs.to(device)
targets = targets.to(device)
3. 过程与结果记录
PyTorch支持使用Tensorboard进行可视化训练过程和结果。使用流程为定义、添加数据、关闭记录和显示结果。
from torch.utils.tensorboard import SummaryWriter
# 定义
writer = SummaryWriter("logs")
# 添加数据
writer.add_image(tag = "test",
img_tensor = img_array,
global_step = 1,
dataformats = "HWC")
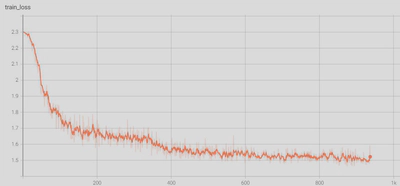
writer.add_scalar(tag = "train_loss",
scalar_value = loss.item(),
global_step = total_train_step)
writer.add_graph(nn_module, input)
# writer.add_images()
# ···
# 关闭记录
writer.close()
结果的显示需要在终端使用命令:
# 进入pytorch所在环境
conda activate pytorch
# 进入日志文件夹所在目录
cd ···
# 打开日志,这里“logs”为日志文件夹名称
tensorboard --logdir=logs
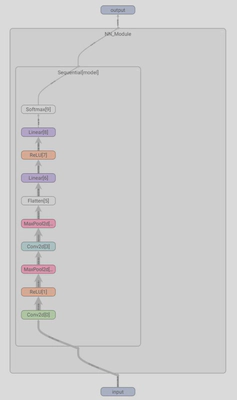
绘制的"常规思路"中的模型示意图如下:
绘制的"常规思路"中的损失函数图如下: